library(tidyverse)
library(dasc2594)
set.seed(2021)20 Eigenvectors and Eigenvalues
We have just learned about change of basis in an abstract sense. Now, we will learn about a special change of basis that is “data-driven” called an eigenvector. Eigenvectors and the corresponding eigenvalues are a vital tool in data science for data compression and modeling.
Definition 20.1 An eigenvector of an \(n \times n\) matrix \(\mathbf{A}\) is a nonzero vector \(\mathbf{x}\) such that the matrix equation
\[ \begin{aligned} \mathbf{A} \mathbf{x} = \lambda \mathbf{x} \end{aligned} \]
for some scalar \(\lambda\). If there exists some \(\lambda \neq 0\) (a non-trivial solutions), then \(\lambda\) is called an eigenvalue of \(\mathbf{A}\) corresponding to the eigenvector \(\mathbf{x}\).
It is easy to check if a vector is an eigenvalue:
Let \(\mathbf{A} = \begin{pmatrix} 0 & 6 & 8 \\ 1/2 & 0 & 0 \\ 0 & 1/2 & 0 \end{pmatrix}\), \(\mathbf{u} = \begin{pmatrix} 16 \\ 4 \\ 1 \end{pmatrix}\), and \(\mathbf{v} = \begin{pmatrix} 2 \\ 2 \\ 2 \end{pmatrix}\). Determine if \(\mathbf{u}\) or \(\mathbf{v}\) are eigenvectors of \(\mathbf{A}\). If they are eigenvectors, what are the associated eigenvalues.
Example 20.1 It is easy to check if a vector is an eigenvalue:
Let \(\mathbf{A} = \begin{pmatrix} 2 & 1 \\ 0 & 1 \end{pmatrix}\), \(\mathbf{u} = \begin{pmatrix} - \frac{\sqrt{2}}{2} \\ \frac{\sqrt{2}}{2} \end{pmatrix}\), and \(\mathbf{v} = \begin{pmatrix} 1 \\ 1 \end{pmatrix}\). Determine if \(\mathbf{u}\) or \(\mathbf{v}\) are eigenvectors of \(\mathbf{A}\). If they are eigenvectors, what are the associated eigenvalues. Now, plot \(\mathbf{u}\), \(\mathbf{A} \mathbf{u}\), \(\mathbf{v}\), and \(\mathbf{A} \mathbf{v}\) to show this relationship geometrically.
Solution
First, we determine if the vectors \(\mathbf{u}\) and \(\mathbf{v}\) are eigenvectors of \(\mathbf{A}\).
If \(\mathbf{u}\) is an eigenvector of a matrix \(\mathbf{A}\), then there exists some constant \(\lambda\) such that \(\mathbf{A} \mathbf{u} = \lambda \mathbf{u}\). Checking this gives
\[ \begin{aligned} \mathbf{A} \mathbf{u} & = \begin{pmatrix} 2 & 1 \\ 0 & 1 \end{pmatrix} \begin{pmatrix} - \frac{\sqrt{2}}{2} \\ \frac{\sqrt{2}}{2} \end{pmatrix} \\ & = \begin{pmatrix} - \frac{\sqrt{2}}{2} \\ \frac{\sqrt{2}}{2} \end{pmatrix} \end{aligned} \]
which shows that \(\mathbf{u}\) is an eigenvector of \(\mathbf{A}\) with associated eigenvalue \(\lambda = 1\). Now, we check if \(\mathbf{v}\) is an eigenvector of \(\mathbf{A}\)
\[ \begin{aligned} \mathbf{A} \mathbf{v} & = \begin{pmatrix} 2 & 1 \\ 0 & 1 \end{pmatrix} \begin{pmatrix} 1 \\ 1 \end{pmatrix} \\ & = \begin{pmatrix} 3 \\ 1 \end{pmatrix} \end{aligned} \]
where there is no number \(\lambda\) such that \(\begin{pmatrix} 3 \\ 1 \end{pmatrix} = \lambda \begin{pmatrix} 1 \\ 1 \end{pmatrix}\). In R, this can be shown
A <- matrix(c(2, 0, 1, 1), 2, 2)
u <- c(-sqrt(2)/2, sqrt(2) / 2)
v <- c(1, 1)
# is u an eigenvector of A?
A %*% u [,1]
[1,] -0.7071068
[2,] 0.7071068# yes, because A %*% u = u
# 1 is the eigenvalue associated with u
# is v an eigenvector of A?
A %*% v [,1]
[1,] 3
[2,] 1# not an eigenvectos because A %*% v is not equal to lambda * v for some lambdaNow, we will plot the vectors \(\mathbf{u}\) and \(\mathbf{v}\) as well as the vectors transformed by the matrix \(\mathbf{A}\) (i.e., \(\mathbf{A} \mathbf{u}\) and \(\mathbf{A} \mathbf{v}\)). The code below plot the vector \(\mathbf{u}\) in dark blue and the transformed vector \(\mathbf{A} \mathbf{u}\) in light blue. The code also plots the vector \(\mathbf{v}\) in dark red and the transformed vector \(\mathbf{A} \mathbf{v}\) in light red.
ggplot() +
geom_segment(aes(x = 0, xend = u[1], y = 0, yend = u[2]), color = "dark blue") +
geom_segment(aes(x = 0, xend = (A %*% u)[1], y = 0, yend = (A %*% u)[2]), color = "light blue", lty = 2) +
geom_segment(aes(x = 0, xend = v[1], y = 0, yend = v[2]), color = "dark red") +
geom_segment(aes(x = 0, xend = (A %*% v)[1], y = 0, yend = (A %*% v)[2]), color = "red") +
coord_cartesian(xlim = c(-5, 5), ylim = c(-5, 5))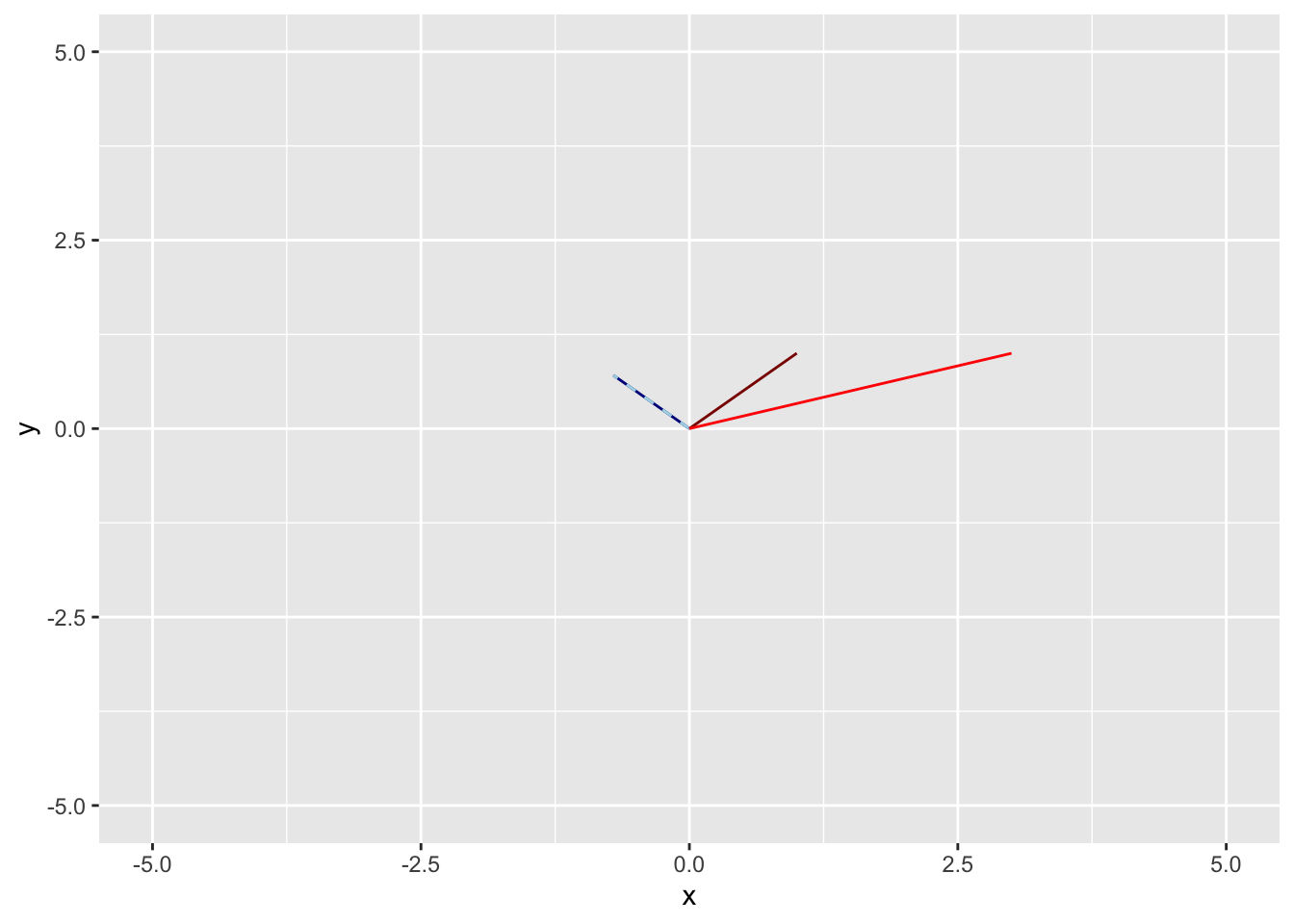
Notice that the multiplication of \(\mathbf{u}\) by \(\mathbf{A}\) gives a vector \(\mathbf{A} \mathbf{u}\) that points along the same line as \(\mathbf{u}\) because \(\mathbf{u}\) is an eigenvector of \(\mathbf{A}\). In comparison, the vector \(\mathbf{v}\) is not an eigenvector of \(\mathbf{A}\) and multiplication of \(\mathbf{v}\) by \(\mathbf{A}\) gives a vector \(\mathbf{A} \mathbf{v}\) that does not point along the same line as the vector \(\mathbf{u}\).
Example 20.2 Come up with another example and another plot that shows the similar result as the example above.
Thus, we end up with the understanding that nn eigenvector is a (nonzero) vector \(\mathbf{x}\) that gets mapped to a scalar multiple of itself \(\lambda \mathbf{x}\) by the matrix transformation defined by \(T: \mathbf{x} \rightarrow \mathbf{A}\mathbf{x} = \mathbf{x}\). As such, when \(\mathbf{x}\) is an eigenvector of \(\mathbf{A}\) we say that \(\mathbf{x}\) and \(\mathbf{A} \mathbf{x}\) are collinear with the origin (\(\mathbf{0}\)) and each other in the sense that these points lie on the same line that goes through the origin.
Note: The matrix \(\mathbf{A}\) must be an \(n \times n\) square matrix. A similar decomposition (called the singular value decomposition) can be used for rectangular matrices.
Example 20.3 Example: reflection Draw images: https://textbooks.math.gatech.edu/ila/eigenvectors.html
Theorem 20.1 (The Distinct Eigenvalues Theorem) Let \(\mathbf{v}_1, \ldots, \mathbf{v}_n\) be eigenvectors of a matrix \(\mathbf{A}\) and suppose the corresponding eigenvalues are \(\lambda_1, \lambda_2, \ldots, \lambda_n\) are all distinct (different values). Then, the set of vectors \(\{\mathbf{v}_1, \ldots, \mathbf{v}_n\}\) is linearly independent.
20.1 Eigenspaces
Given a square \(n \times n\) matrix \(\mathbf{A}\), we know how to check if a given vector \(\mathbf{x}\) is an eigenvector and then how to find the eigenvalue associated with that eigenvector. Next, we want to check if a given number is an eigenvalue of \(\mathbf{A}\) and to find all the eigenvectors corresponding to that eigenvalue.
Given a square \(n \times n\) matrix \(\mathbf{A}\) and a scalar \(\lambda\), the eigenvectors of \(\mathbf{A}\) associated with the scalar \(\lambda\) (if there are eigenvectors associated with \(\lambda\)) are the nonzero solutoins to the equation \(\mathbf{A} \mathbf{x} = \lambda \mathbf{x}\). This can be written as
\[ \begin{aligned} \mathbf{A} \mathbf{x} & = \lambda \mathbf{x} \\ \mathbf{A} \mathbf{x} -\lambda \mathbf{x} & = \mathbf{0} \\ \mathbf{A} \mathbf{x} -\lambda \mathbf{I} \mathbf{x} & = \mathbf{0} \\ \left( \mathbf{A} -\lambda \mathbf{I} \right) \mathbf{x} & = \mathbf{0}. \\ \end{aligned} \]
Therefore, the eigenvectors of \(\mathbf{A}\) associated with \(\lambda\), if there are any, are the nontrivial solutions of the homogeneous matrix equation \(\left( \mathbf{A} - \lambda \mathbf{I} \right) \mathbf{x} = \mathbf{0}\). In other words, the eigenvectors are the nonzero vectors in the null space null\(\left( \mathbf{A} -\lambda \mathbf{I} \right)\). If there is not a nontrivial solution (solution \(\mathbf{x} \neq \mathbf{0}\)), then \(\lambda\) is not an eigenvalue of \(\mathbf{A}\).
Hey, we know how to find solutions to homogeneous systems of equations! Thus, we know how to find the eigenvectors of \(\mathbf{A}\). All we have to do is solve the system of linear equations \(\left( \mathbf{A} -\lambda \mathbf{I} \right) \mathbf{x} = \mathbf{0}\) for a given \(\lambda\) (actually, for all \(\lambda\)s, which we can’t do). If only there was some way to find eigenvalues \(\lambda\) (hint: there is and it is coming next chapter).
Example 20.4
Let \(\mathbf{A} = \begin{pmatrix} 3 & 6 & -8 \\ 0 & 0 & 6 \\ 0 & 0 & 2 \end{pmatrix}\). Then an eigenvector with eigenvector \(\lambda\) is a nontrival solution to
\[ \begin{aligned} \left( \mathbf{A} - \lambda \mathbf{I} \right) \mathbf{x} & = \mathbf{0} \end{aligned} \]
which can be written as
\[ \begin{aligned} \begin{pmatrix} 3 - \lambda & 6 & -8 \\ 0 & 0 - \lambda & 6 \\ 0 & 0 & 2 - \lambda \end{pmatrix} \begin{pmatrix} x_1 \\ x_2 \\ x_3 \end{pmatrix} & = \mathbf{0} \end{aligned} \]
which can be solved for a given \(\lambda\) using an augmented matrix form and row operations to reduce to reduced row echelon form.
Letting \(\lambda = 3\), we have
\[ \begin{aligned} \begin{pmatrix} 3 - 3 & 6 & -8 \\ 0 & 0 - 3 & 6 \\ 0 & 0 & 2 - 3 \end{pmatrix} \begin{pmatrix} x_1 \\ x_2 \\ x_3 \end{pmatrix} & = \mathbf{0} \end{aligned} \]
which can be written as the matrix equation
\[ \begin{aligned} \begin{pmatrix} 0 & 6 & -8 \\ 0 & -3 & 6 \\ 0 & 0 & -1 \end{pmatrix} \begin{pmatrix} x_1 \\ x_2 \\ x_3 \end{pmatrix} & = \mathbf{0} \end{aligned} \]
Note that the columns of the matrix above are not linearly independent. Thus, we can solve a non-unique solution (the solution set is a line going through the origin) by finding the reduce row echelon form of an augmented matrix
\[ \begin{aligned} \begin{pmatrix} 0 & 6 & -8 & 0 \\ 0 & -3 & 6 & 0 \\ 0 & 0 & -1 & 0 \end{pmatrix} & \stackrel{rref}{\sim} \begin{pmatrix} 0 & 1 & 0 & 0 \\ 0 & 0 & 1 & 0 \\ 0 & 0 & 0 & 0 \end{pmatrix} \end{aligned} \]
which has solution
\[ \begin{aligned} x_1 & = x_1 \\ x_2 & = 0 \\ x_3 & = 0 \end{aligned} \]
Fixing \(x_1 = 1\) gives the eigenvector associated with \(\lambda = 3\) of \(\begin{pmatrix} 1 \\ 0 \\ 0 \end{pmatrix}\). We can verify that this is an eigenvector with matrix multiplication
\[ \begin{aligned} \begin{pmatrix} 3 & 6 & -8 \\ 0 & 0 & 6 \\ 0 & 0 & 2 \end{pmatrix} \begin{pmatrix} 1 \\ 0 \\ 0 \end{pmatrix} & = \begin{pmatrix} 3 \\ 0 \\ 0 \end{pmatrix} = 3 \begin{pmatrix} 1 \\ 0 \\ 0 \end{pmatrix} \end{aligned} \]
Using R, this can be done as
lambda <- 3
# apply rref to the augmented matrix
rref(cbind(A - lambda * diag(nrow(A)), 0)) [,1] [,2] [,3] [,4]
[1,] 0 1 0 0
[2,] 0 0 1 0
[3,] 0 0 0 0where the solution set is determined from the RREF form of the augmented matrix of the equation \(\left( \mathbf{A} - \lambda \mathbf{I} \right) \mathbf{x} = \mathbf{0}\)
Example 20.5
Let \(\mathbf{A} = \begin{pmatrix} -21/5 & -34/5 & 18/5 \\ -6/5 & -14/5 & 3/5 \\ -4 & -10 & 5 \end{pmatrix}\). Find the eigenvectors associated with the eigenvalues (a) \(\lambda_1 = -4\), (b) \(\lambda_2 = 3\), and (c) \(\lambda_3 = -1\).
Definition 20.2 Let \(\mathbf{A}\) be an \(n \times n\) matrix and let \(\lambda\) be an eigenvalue of \(\mathbf{A}\). Then, the \(\lambda\)-eigenspace of \(\mathbf{A}\) is the solution set of the matrix equation \(\left( \mathbf{A} - \lambda \mathbf{I} \right) \mathbf{x} = \mathbf{0}\) which is the subspace null(\(\mathbf{A} - \lambda \mathbf{I}\)).
Therefore, the \(\lambda\)-eigenspace is a subspace (the null space of any matrix is a subspace) that contains the zero vector \(\mathbf{0}\) and all the eigenvectors of \(\mathbf{A}\) with corresponding eigenvalue \(\lambda\).
Example 20.6
For \(\lambda\) = (a) -2, (b) 1, and (c) 3, decide if \(\lambda\) is a eigenvalue of the matrix \(\mathbf{A} = \begin{pmatrix} 3 & 0 \\ -3 & 2 \end{pmatrix}\) and if so, compute a basis for the \(\lambda\)-eigenspace.
Example 20.7
Let \(\mathbf{A} = \begin{pmatrix} 17/5 & 8/5 & -6/5 \\ 0 & 3 & 0 \\ 4/5 & 16/5 & 3/5 \end{pmatrix}\). Find the eigenvectors associated with the eigenvalues (a) \(\lambda = 3\) and (b) \(\lambda = 1\). For each eigen value, also find the basis for the associated eigen-space.
20.1.1 Computing Eigenspaces
Let \(\mathbf{A}\) be a \(n \times n\) matrix and let \(\lambda\) be a scalar.
\(\lambda\) is an eigenvalue of \(\mathbf{A}\) if and only if \((\mathbf{A} - \lambda \mathbf{I})\mathbf{x} = \mathbf{0}\) has a non-trivial solution. The matrix equation \((\mathbf{A} - \lambda \mathbf{I})\mathbf{x} = \mathbf{0}\) has a non-trivial solution if and only if null\((\mathbf{A} - \lambda \mathbf{I}) \neq \{\mathbf{0} \}\)
Finding a basis for the \(\lambda\)-eigenspace of \(\mathbf{A}\) is equivalent to finding a basis for null\((\mathbf{A} - \lambda \mathbf{I})\) which can be done by finding parametric forms of the solutions of the homogeneous system of equations \((\mathbf{A} - \lambda \mathbf{I})\mathbf{x} = \mathbf{0}\).
The dimension of the \(\lambda\)-eigenspace of \(\mathbf{A}\) is equal to the number of free variables in the system of equations \((\mathbf{A} - \lambda \mathbf{I})\mathbf{x} = \mathbf{0}\) which is the number of non-pivot columns of \(\mathbf{A} - \lambda \mathbf{I}\).
The eigenvectors with eigenvalue \(\lambda\) are the nonzero vectors in null\((\mathbf{A} - \lambda \mathbf{I})\) which are equivalent to the nontrivial solutions of \((\mathbf{A} - \lambda \mathbf{I})\mathbf{x} = \mathbf{0}\).
Note that this leads of a fact about the \(0\)-eigenspace.
Definition 20.3 Let \(\mathbf{A}\) be an \(n \times n\) matrix. Then
The number 0 is an eigenvalue of \(\mathbf{A}\) if and only if \(\mathbf{A}\) is not invertible.
If 0 is an eigenvalue of \(\mathbf{A}\), then the 0-eigenspace of \(\mathbf{A}\) is null\((\mathbf{A})\).
Theorem 20.2 (Invertible Matrix Theorm + eigenspaces) This is an extension of the prior statement of the invertible matrix Theorem 9.5 Let \(\mathbf{A}\) be an \(n \times n\) matrix and \(T: \mathcal{R}^n \rightarrow \mathcal{R}^n\) be the linear transformation given by \(T(\mathbf{x}) = \mathbf{A}\mathbf{x}\). Then the following statements are equivalent (i.e., they are all either simultaneously true or false).
\(\mathbf{A}\) is invertible.
\(\mathbf{A}\) has n pivot columns.
null\((\mathbf{A}) = \{\mathbf{0}\}\).
The columns of \(\mathbf{A}\) are linearly independent.
The columns of \(\mathbf{A}\) span \(\mathcal{R}^n\).
The matrix equation \(\mathbf{A} \mathbf{x} = \mathbf{b}\) has a uniqu solution for each \(\mathbf{b} \in \mathcal{R}^n\).
The transormation \(T\) is invertible.
The transormation \(T\) is one-to-one.
The transormation \(T\) is onto.
det\((\mathbf{A}) \neq 0\)
0 is not an eigenvalue of \(\mathbf{A}\)